Binary classification using pytket-qujax¶
Download this notebook - pytket-qujax-classification.ipynb
See the docs for qujax and pytket-qujax.
from jax import numpy as jnp, random, vmap, value_and_grad, jit
from pytket import Circuit
from pytket.circuit.display import render_circuit_jupyter
from pytket.extensions.qujax.qujax_convert import tk_to_qujax
import matplotlib.pyplot as plt
Define the classification task¶
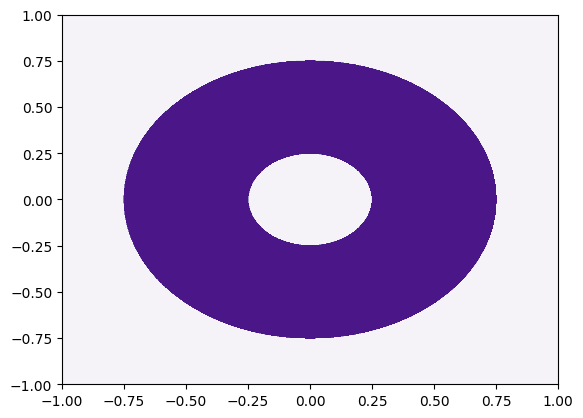
We’ll try and learn a donut binary classification function (i.e. a bivariate coordinate is labelled 1 if it is inside the donut and 0 if it is outside)
inner_rad = 0.25
outer_rad = 0.75
def classification_function(x, y):
r = jnp.sqrt(x**2 + y**2)
return jnp.where((r > inner_rad) * (r < outer_rad), 1, 0)
linsp = jnp.linspace(-1, 1, 1000)
Z = vmap(lambda x: vmap(lambda y: classification_function(x, y))(linsp))(linsp)
plt.contourf(linsp, linsp, Z, cmap="Purples")
<matplotlib.contour.QuadContourSet at 0x16ac8bfd0>
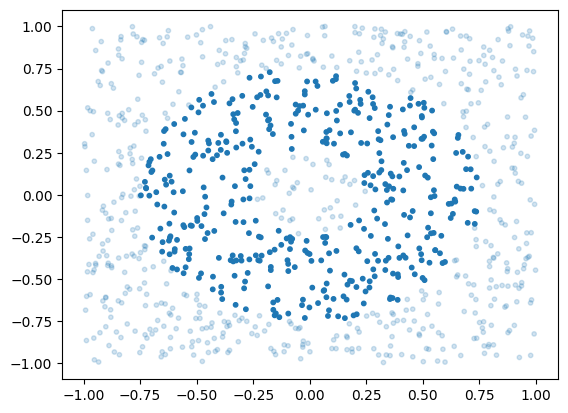
Now let’s generate some data for our quantum circuit to learn from
n_data = 1000
x = random.uniform(random.PRNGKey(0), shape=(n_data, 2), minval=-1, maxval=1)
y = classification_function(x[:, 0], x[:, 1])
plt.scatter(x[:, 0], x[:, 1], alpha=jnp.where(y, 1, 0.2), s=10)
<matplotlib.collections.PathCollection at 0x280c35b50>
Quantum circuit time¶
We’ll use a variant of data re-uploading Pérez-Salinas et al to encode the input data, alongside some variational parameters within a quantum circuit classifier
n_qubits = 3
depth = 5
c = Circuit(n_qubits)
for layer in range(depth):
for qi in range(n_qubits):
c.Rz(0.0, qi)
c.Ry(0.0, qi)
c.Rz(0.0, qi)
if layer < (depth - 1):
for qi in range(layer, layer + n_qubits - 1, 2):
c.CZ(qi % n_qubits, (qi + 1) % n_qubits)
c.add_barrier(range(n_qubits))
render_circuit_jupyter(c)
We can use pytket-qujax to generate our angles-to-statetensor function.
angles_to_st = tk_to_qujax(c)
We’ll parameterise each angle as
where
n_angles = 3 * n_qubits * depth
n_params = 2 * n_angles
def param_and_x_to_angles(param, x_single):
biases = param[:n_angles]
weights = param[n_angles:]
weights_times_data = jnp.where(
jnp.arange(n_angles) % 2 == 0, weights * x_single[0], weights * x_single[1]
)
angles = biases + weights_times_data
return angles
param_and_x_to_st = lambda param, x_single: angles_to_st(
param_and_x_to_angles(param, x_single)
)
We’ll measure the first qubit only (if its 1 we label donut, if its 0 we label not donut)
def param_and_x_to_probability(param, x_single):
st = param_and_x_to_st(param, x_single)
all_probs = jnp.square(jnp.abs(st))
first_qubit_probs = jnp.sum(all_probs, axis=range(1, n_qubits))
return first_qubit_probs[1]
For binary classification, the likelihood for our full data set
where
which we would like to maximise.
Unfortunately, the log-likelihood cannot be approximated unbiasedly using shots, that is we can approximate
Instead we can minimise an expected distance between shots and data
where
The full batch cost function is
Note that to calculate the cost function we need to evaluate the statetensor for every input point
def param_to_cost(param):
donut_probs = vmap(param_and_x_to_probability, in_axes=(None, 0))(param, x)
costs = jnp.where(y, 1 - donut_probs, donut_probs)
return costs.mean()
Ready to descend some gradients?¶
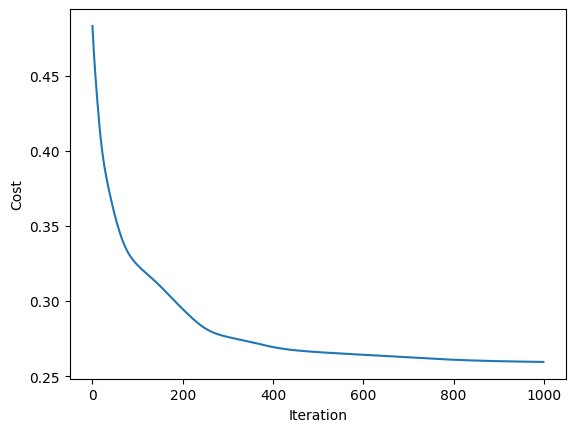
We’ll just use vanilla gradient descent here
param_to_cost_and_grad = jit(value_and_grad(param_to_cost))
n_iter = 1000
stepsize = 1e-1
param = random.uniform(random.PRNGKey(1), shape=(n_params,), minval=0, maxval=2)
costs = jnp.zeros(n_iter)
for i in range(n_iter):
cost, grad = param_to_cost_and_grad(param)
costs = costs.at[i].set(cost)
param = param - stepsize * grad
print(i, "Cost: ", cost, end="\r")
999 Cost: 0.25950647
plt.plot(costs)
plt.xlabel("Iteration")
plt.ylabel("Cost")
Text(0, 0.5, 'Cost')
Visualise trained classifier¶
linsp = jnp.linspace(-1, 1, 100)
Z = vmap(
lambda a: vmap(lambda b: param_and_x_to_probability(param, jnp.array([a, b])))(
linsp
)
)(linsp)
plt.contourf(linsp, linsp, Z, cmap="Purples", alpha=0.8)
circle_linsp = jnp.linspace(0, 2 * jnp.pi, 100)
plt.plot(inner_rad * jnp.cos(circle_linsp), inner_rad * jnp.sin(circle_linsp), c="red")
plt.plot(outer_rad * jnp.cos(circle_linsp), outer_rad * jnp.sin(circle_linsp), c="red")
[<matplotlib.lines.Line2D at 0x284a77910>]
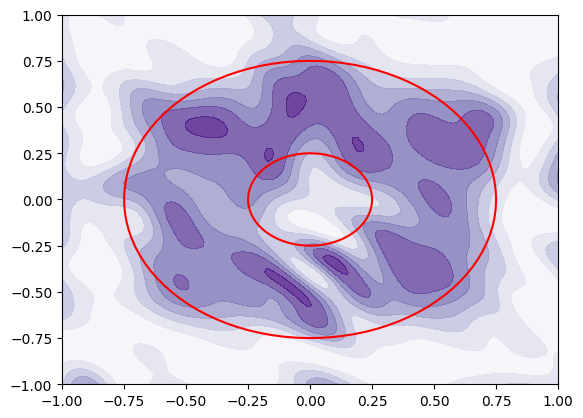
Looks good, it has clearly grasped the donut shape. Sincerest apologies if you are now hungry! 🍩